
1.Nitrile มีคุณสมบัติ ทนต่อน้ำมัน ความร้อน ไม่เสียรูปเมื่อเกิดการชน มีอายุการใช้งานที่ยาว เหมาะกับ การดูดแผ่นเหล็ก กระจก งานผิวเรียบ
2.Benz Rubber มีคุณสมบัติ ทนต่อน้ำมัน คลอรีน ทนต่อน้ำมัน ความร้อน ไม่เสียรูปเมื่อเกิดการชน ไม่ทิ้งคราบบนวัสดุที่ดูด เหมาะกับ การดูดแผ่นเหล็ก กระจก งานผิวเรียบ โดยเฉพาะอุตสาหกรรมยานยนต์
3.Stain resistant Biond Rubber มีคุณสมบัติยืดหยุ่นดี ไม่ทิ้งคราบบนวัสดุที่ดูด เหมาะกับ การดูดหินอ่อน การดูดแผ่นเหล็ก กระจก
4.Antistatic Nitrile Rubber มีคุณสมบัติ นำไฟฟ้า ทนต่อน้ำมัน ความร้อน ไม่เสียรูปเมื่อเกิดการชน มีอายุการใช้งานที่ยาว เหมาะกับ งานอิเลคทรอนิก ที่อ่อนไหวต่อไฟฟ้าสถิต
5.Para Rubber มีคุณสมบัติยืดหยุ่นดี เหมาะกับ การดูดหินอ่อน ไม้ พลาสติก อิฐ
6.Natural Rubber มีคุณสมบัติยืดหยุ่นดี เหมาะกับ การดูดผิวที่ไม่เรียบ เช่นกระดาษ พลาสติก ห่อขนม
7.Geranium Foam Rubber มีคุณสมบัติยืดหยุ่นดี เหมาะกับ การดูดผิวที่ไม่เรียบรับน้ำหนักได้ดี
8.Silicon มีคุณสมบัติ การใช้งานในช่วงอุณหภูมิที่กว้างมากตั้งแต่ -50-300 C เหมาะกับ การดูดอาหาร
9.Viton มีคุณสมบัติ ทนต่อสารเคมีและอุณภูมิที่สูง เหมาะกับ อุตสาหกรรมการผลิตยา
10.Vulkollan Polyurethane มีคุณสมบัติ ทนการกัดกร่อน น้ำมัน การบิด เหมาะกับ การใช้งานที่หนักหน่วง
11.Dutral มีคุณสมบัติ มีคุณสมบัติยืดหยุ่นน้อย ทนต่ออุณหภูมิที่ต่ำมากถึง -60 C เหมาะกับสภาพแวดล้อมทางทะเล
12.Neoprene มีคุณสมบัติ ทนต่อการฉีกและแรงอัด เหมาะกับงานภาคสนาม งานไฟฟ้า
13.Rubber Foam Neoprene มีคุณสมบัติยืดหยุ่นดี เหมาะกับ การดูดผิวที่ไม่เรียบรับน้ำหนักได้ดี ติดไฟยาก
หลักการเลือกมือหุ่นยนต์ Gripper ระบบนิวเมติก
แบ่งเป็น 2 ประเภทใหญ่ๆ
1. 2 Jaws gripper มี2 นิ้ว ใช้บีบหรือถ่างวัตถุเหมาะกับการใช้งานทั่วไป ออกแบบนิ้วได้ง่าย
1.1 แบบขนาน ลักษณะการเคลื่อนที่แบบขนานแนวเส้นตรง
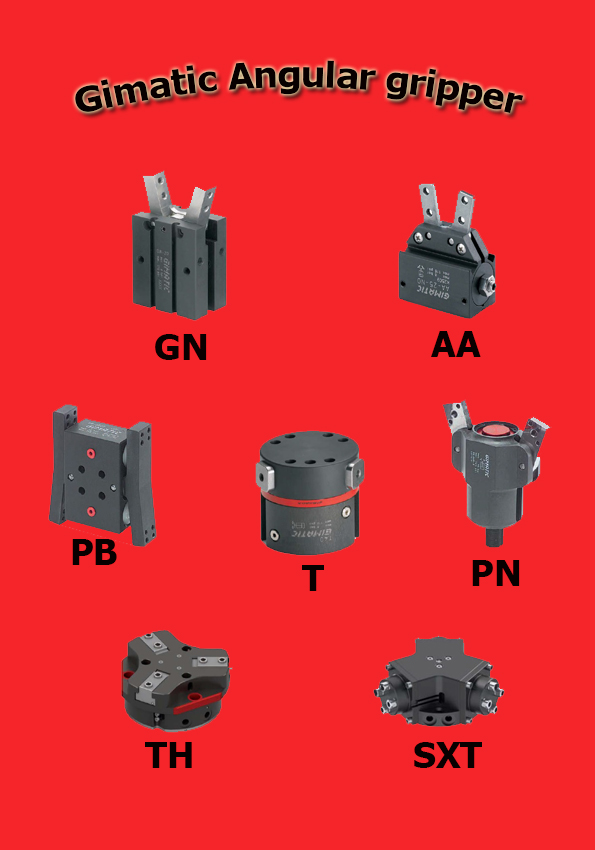
1.2 แบบเชิงมุม ลักษณะการเคลื่อนที่แบบเชิงมุม ทำงานคล้ายกล้ามปู สามารถเปิดมุมได้กว้างถึง 180 องศา
2. 3 Jaws gripper มี3 นิ้ว ใช้บีบหรือถ่างวัตถุเหมาะกับการใช้งานประเภทงานกลม ส่วนใหญ่การใช้งานจะเป็นแบบขนาน
การเลือกgripper ให้เหมาะกับงานจะต้องคำนึงถึงปัจจัยต่างๆดังนี้
1. ขนาดของสิ่งของที่จะหยิบ ถ้ามีหลายขนาดจะต้องคำนวณระยะชักให้ถูกต้อง
2. น้ำหนักของวัตถุ ซึ่งจะต้องใช้เทียบกับสเปคการรับแรงดึง ดัน ค่าโมเมนต์ ของตัว gripper
3. แรงของการปิดและเปิด gripper ทั้งนี้ลักษณะและรูปร่างของชิ้นงานจะเป็นตัวกำหนด ถ้าการจับงานที่ผิวเรียบ แรงเสียดทานของผิวจะน้อย ทำให้ต้องใช้แรงมาก
4. น้ำหนักของ gripper จะต้องอยู่ในช่วงใช้งานของ Robot ไม่หนักจนเกินไป
5. สภาพแวดล้อม เช่นมีความร้อนสูง หรือ เย็น สกปรกหรือสะอาด

1.เชคสเปคของหุ่นยนต์ว่ารับน้ำหนักได้กี่เท่าไหร่ โดยทั่วไปจะเลือกให้ Tool changer รับน้ำหนักได้พอๆกับ robot
2.หาน้ำหนักของ มือหุ่นยนต์หรืออุปกรณ์ที่จะติด แล้วเผื่อ safety ประมาณ 1.5-2 เท่า เพื่อเลือก payload ของ Tool changer
3.เชคดูว่าต้องการ option อะไรบ้าง เช่น air port ,electric port ,fluid port, ต้องใช้กี่port
4.หาตำแหน่งเยื้องศูนย์จุด central of gravity(CG) ของมือหุ่นยนต์ กับหน้าแปลนของหุ่นยนต์ เพื่อคำนวณหาโมเมนท์การหมุนที่แกน x,y,z แล้วเลือกสเปค เผื่อ safety ประมาณ 1.5-2 เท่า